Isophote

In geometry, an isophote is a curve on an illuminated surface that connects points of equal brightness. One supposes that the illumination is done by parallel light and the brightness b is measured by the following scalar product:
where is the unit normal vector of the surface at point P and the unit vector of the light's direction. If b(P) = 0, i.e. the light is perpendicular to the surface normal, then point P is a point of the surface silhouette observed in direction Brightness 1 means that the light vector is perpendicular to the surface. A plane has no isophotes, because every point has the same brightness.
In astronomy, an isophote is a curve on a photo connecting points of equal brightness. [1]
Application and example
In computer-aided design, isophotes are used for checking optically the smoothness of surface connections. For a surface (implicit or parametric), which is differentiable enough, the normal vector depends on the first derivatives. Hence, the differentiability of the isophotes and their geometric continuity is 1 less than that of the surface. If at a surface point only the tangent planes are continuous (i.e. G1-continuous), the isophotes have there a kink (i.e. is only G0-continuous).
In the following example (s. diagram), two intersecting Bezier surfaces are blended by a third surface patch. For the left picture, the blending surface has only G1-contact to the Bezier surfaces and for the right picture the surfaces have G2-contact. This difference can not be recognized from the picture. But the geometric continuity of the isophotes show: on the left side, they have kinks (i.e. G0-continuity), and on the right side, they are smooth (i.e. G1-continuity).
-
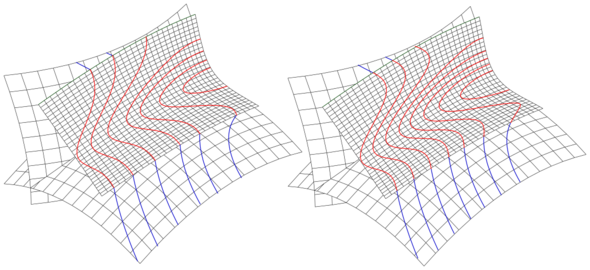 Isophotes on two Bezier surfaces and a G1-continuous (left) and G2-continuous (right) blending surface: On the left the isophotes have kinks and are smooth on the right
Isophotes on two Bezier surfaces and a G1-continuous (left) and G2-continuous (right) blending surface: On the left the isophotes have kinks and are smooth on the right

Determining points of an isophote
On an implicit surface
For an implicit surface with equation the isophote condition is That means: points of an isophote with given parameter c are solutions of the nonlinear system which can be considered as the intersection curve of two implicit surfaces. Using the tracing algorithm of Bajaj et al. (see references) one can calculate a polygon of points.
On a parametric surface
In case of a parametric surface the isophote condition is
which is equivalent to This equation describes an implicit curve in the s-t-plane, which can be traced by a suitable algorithm (see implicit curve) and transformed by into surface points.
See also
References
- J. Hoschek, D. Lasser: Grundlagen der geometrischen Datenverarbeitung, Teubner-Verlag, Stuttgart, 1989, ISBN 3-519-02962-6, p. 31.
- Z. Sun, S. Shan, H. Sang et al.: Biometric Recognition, Springer, 2014, ISBN 978-3-319-12483-4, p. 158.
- C.L. Bajaj, C.M. Hoffmann, R.E. Lynch, J.E.H. Hopcroft: Tracing Surface Intersections, (1988) Comp. Aided Geom. Design 5, pp. 285–307.
- C. T. Leondes: Computer Aided and Integrated Manufacturing Systems: Optimization methods, Vol. 3, World Scientific, 2003, ISBN 981-238-981-4, p. 209.
- ↑ J. Binney, M. Merrifield: Galactic Astronomy, Princeton University Press, 1998, ISBN 0-691-00402-1, p. 178.
External links
- Patrikalakis-Maekawa-Cho: Isophotes (engl.)
- A. Diatta, P. Giblin: Geometry of Isophote Curves
- Jin Kim: Computing Isophotes of Surface of Revolution and Canal Surface
 |  |
