Scale-invariant feature operator
From HandWiki
Short description: Algorithm to detect local features in images
| Feature detection |
|---|
| Edge detection |
| Corner detection |
| Blob detection |
| Ridge detection |
| Hough transform |
| Structure tensor |
| Affine invariant feature detection |
| Feature description |
| Scale space |
In the fields of computer vision and image analysis, the scale-invariant feature operator (or SFOP) is an algorithm to detect local features in images. The algorithm was published by Förstner et al. in 2009.[1]
Algorithm
The scale-invariant feature operator (SFOP) is based on two theoretical concepts:
Desired properties of keypoint detectors:
- Invariance and repeatability for object recognition
- Accuracy to support camera calibration
- Interpretability: Especially corners and circles, should be part of the detected keypoints (see figure).
- As few control parameters as possible with clear semantics
- Complementarity to known detectors
scale-invariant corner/circle detector.
Theory
Maximize the weight
Maximize the weight = 1/variance of a point
comprising:
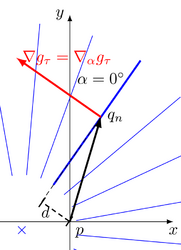
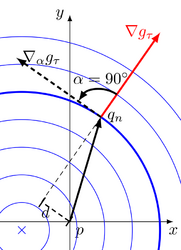
1. the image model[2]
- Distance d of an edge from a reference point p in a spiral feature
-
-
-




2. the smaller eigenvalue of the structure tensor
Reduce the search space
Reduce the 5-dimensional search space by
- linking the differentiation scale to the integration scale
- solving for the optimal using the model
- and determining the parameters from three angles, e. g.
- pre-selection possible:
Filter potential keypoints
- non-maxima suppression over scale, space and angle
- thresholding the isotropy :
eigenvalues characterize the shape of the keypoint, smallest eigenvalue has to be larger than threshold
derived from noise variance and significance level :
Algorithm

Results
Interpretability of SFOP keypoints
- Results of different detectors on a Siemens star
-
 Sfop: junctions red, circular features cyan
Sfop: junctions red, circular features cyan -
 Edge-based Regions
Edge-based Regions -
 Intensity-based Regions
Intensity-based Regions -

-

-

-








See also
References
- ↑ Forstner, Wolfgang; Dickscheid, Timo; Schindler, Falko (2009). "Detecting interpretable and accurate scale-invariant keypoints". 2009 IEEE 12th International Conference on Computer Vision. pp. 2256–2263. doi:10.1109/ICCV.2009.5459458. ISBN 978-1-4244-4420-5.
- ↑ 2.0 2.1 Bigün, J. (1990). "A Structure Feature for Some Image Processing Applications Based on Spiral Functions". Computer Vision, Graphics, and Image Processing 51 (2): 166–194.
- ↑ Förstner, Wolfgang (1994). "A Framework for Low Level Feature Extraktion". 3. Stockholm, Sweden. pp. 383–394.
External links
 |  |
