Jansen's linkage


Jansen's linkage is a planar leg mechanism designed by the kinetic sculptor Theo Jansen to generate a smooth walking motion.[1] Jansen has used his mechanism in a variety of kinetic sculptures which are known as Strandbeesten (Dutch for "beach beasts"). Jansen's linkage bears artistic as well as mechanical merit for its simulation of organic walking motion using a simple rotary input.[2] These leg mechanisms have applications in mobile robotics and in gait analysis.[3][4]
The central 'crank' link moves in circles as it is actuated by a rotary actuator such as an electric motor. All other links and pin joints are unactuated and move because of the motion imparted by the crank. Their positions and orientations are uniquely defined by specifying the crank angle and hence the mechanism has only one degree of freedom (1-DoF).[5] The kinematics and dynamics of the Jansen mechanism have been exhaustively modeled using circle intersection method and bond graphs (Newton–Euler mechanics).[6] These models can be used to rate the actuator torque and in design of the hardware and controller for such a system.
Illustrations
-
 Animation of one leg
Animation of one leg -
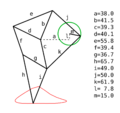 Length of the rods
Length of the rods -
 Animation of six legs
Animation of six legs



References
- ↑ Edgar Alonso Martínez García (6 October 2015). "13". Numerical Modelling in Robotics. OmniaScience. p. 336. ISBN 978-84-942118-8-1. https://books.google.com/books?id=pBKqCgAAQBAJ&pg=PA336.
- ↑ Giesbrecht, Daniel (8 April 2010). Design and optimization of a one-degree-of-freedom eight-bar leg mechanism for a walking machine (Thesis). University of Manitoba. hdl:1993/3922.
While legged walking mechanisms have been designed and built based on engineering theories, they have also attracted much attention from the art fields. The kinetic sculpture "Wind Beast" is a multi-legged walking mechanism powered by wind. It was created by Mr. Theo Jansen, a Dutch kinetic sculptor. The mechanism has many advantages from the design viewpoint, such as: it has a SDOF, a crank as an input link and an ovoid footpath. Also, two legs are in pair and are mirrored, where they share the same crank as the input link. This is beneficial because a central shaft can be used to operate all the legs without adding extra actuators.
- ↑ Hernández, Alejandra Carolina; Gómez, Clara; Crespo, Jonathan; Barber, Ramón (2016). A home made robotic platform based on theo jansen mechanism for teaching robotics. IATED. doi:10.21125/inted.2016.0579. ISBN 9788460856177.
- ↑ Nansai, Shunsuke; Elara, Mohan Rajesh; Iwase, Masami (2013). "Dynamic Analysis and Modeling of Jansen Mechanism". Procedia Engineering 64: 1562–1571. doi:10.1016/j.proeng.2013.09.238. ISSN 1877-7058.
- ↑ Nansai, Shunsuke; Rojas, Nicolas; Elara, Mohan Rajesh; Sosa, Ricardo; Iwase, Masami (2015-03-18). "On a Jansen leg with multiple gait patterns for reconfigurable walking platforms". Advances in Mechanical Engineering 7 (3): 168781401557382. doi:10.1177/1687814015573824. ISSN 1687-8140.
- ↑ Patnaik, Lalit (2016). "Kinematics and dynamics of Jansen leg mechanism: A bond graph approach.". Simulation Modelling Practice and Theory 60: 160–169. doi:10.1016/j.simpat.2015.10.003. http://eprints.iisc.ac.in/52992/1/Sci_Rep_5_17621_2015.pdf.
External links
- Theo Jansen's STRANDBEEST
- Theo Jansens Strandbeest-Mechanismus (German)
- Strandbeest created with GeoGebra
- 2D Shadertoy
- 3D Shadertoy
 |  |
