Engineering:Navcam

Navcam, short for navigational camera, is a type of camera found on certain robotic rovers or spacecraft used for navigation without interfering with scientific instruments.[1][2][3] Navcams typically take wide angle photographs that are used to plan the next moves of the vehicle[4] or object tracking.[1]
Overview
The Mars Curiosity rover has two pairs of black and white navigation cameras mounted on the mast to support ground navigation. The cameras have a 45 degree angle of view and use visible light to capture stereoscopic 3-D imagery.[5] These cameras, like those on the Mars Pathfinder missions support use of the ICER image compression format[citation needed].
European Space Agency Rosetta spacecraft used a single camera with 5 degree field of view and 12 bit 1024x1024px resolution allowing for visual tracking on each of spacecraft approaches to the asteroids and finally the comet.[1]
Gallery
-
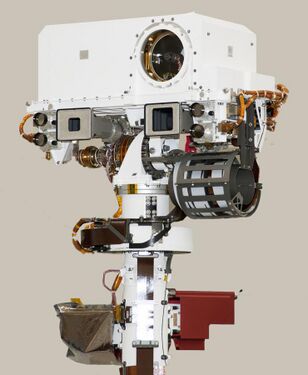 Curiosity rover's mast with two navcams
Curiosity rover's mast with two navcams -
 Mars Exploration Rover's mast with two Pancams (on its sides) and two navcams
Mars Exploration Rover's mast with two Pancams (on its sides) and two navcams -
 Example of photo made by Opportunity's navcam
Example of photo made by Opportunity's navcam -
 First photo made by Curiosity's navcam
First photo made by Curiosity's navcam




See also
- Astrionics
- Hazard avoidance camera (Hazcam)
- Panoramic camera (Pancam)
- Optical, Spectroscopic, and Infrared camera OSIRIS
- List of NASA cameras on spacecraft
- Mars rover
References
- ↑ 1.0 1.1 1.2 "Comet 67P/C-G in Rosetta's navigation camera". ESA. http://blogs.esa.int/rosetta/2014/06/25/comet-67pc-g-in-rosettas-navigation-camera/. Retrieved 15 August 2015.
- ↑ "The rover's "eyes" and other "senses"". Mars Exploration Rover Mission. NASA Jet Propulsion Laboratory. http://marsrover.nasa.gov/mission/spacecraft_rover_eyes.html. Retrieved 3 January 2013.
- ↑ "How A Team Of Scientists Dropped A One-Ton Science Lab On Mars Completely Unscathed". The Business Insider. 17 December 2012.
- ↑ "More Driving And Imaging At 'Matijevic Hill'". Space Daily. November 26, 2012.
- ↑ First NavCam mosaic
| General |  | |
|---|---|---|
| Instruments | ||
| Features | ||
| Sites | ||
| Rocks | ||
Mars Exploration Rover (MER) program | ||
|---|---|---|
| General |
|  |
| Spirit rover | ||
| Opportunity rover | ||
| Instruments |
| |
| Related |
| |
| Science payload |  | ||||||
|---|---|---|---|---|---|---|---|
| Features | |||||||
| Proposed landing sites |
| ||||||
 |  |
